bobapp网站


























Nyheder lagt ud pa: 2018/6/21 7:48:29 -林恩-RFIDtagworld XMINNOV RFID Tag Producent


Hvis selvkørende biler på en stor skala implementering sandsynligvis vil producere en stor økonomisk og social fordel, herunder meget reducere trafikdøde, skader og trængsel, og gøre alle få billigere, mere fleksible og mere produktive transportmidler. Intel's Mobileye har udviklet en innovativ ramme for modellen. Det drejer sig om to grundlæggende søjler: 1) gennemprøvet sikkerhed garanterer og 2) økonomisk skalerbarhed. Denne artikel introducerer sikkerhedsunderstøttelsen af denne model til flere læsere.
Programoversigt
Vores foreslåede model giver en detaljeret, praktisk og effektiv løsning til design og kontrol af et AV-system, hvilket dermed forbedrer sikkerheden. Følgende er en oversigt over de områder, vi tror, er værd at være opmærksom på det næste trin, og de løsninger, vi foreslår:
1, et sæt forudbestemte regler for hurtig og præcis vurdering og bestemmelse af ansvar for AV'er i en kollision med et pilotkøretøj:
Billede 1 illustrerer følgende. Hvis der er noget galt med bilen, der er drevet udenfor, og du rammer AV, er der ingen måde for AV at undgå kollision. Men det sker hele tiden, så selvom vi forbyder AV, er det futile. Konklusionen er, at enhver nyttig AV vil involvere situationer, der kan føre til ulykker, herunder mekaniske fejl og eksterne kræfter.

Som vist på billedet 1, kan den centrale bil ikke garantere absolut sikkerhed
Den formele model af fejl giver oprettelse af beslutning (drivning politik) software til at undgå ulykker forårsaget af AV-systemer. Det kan også valideres på en effektiv måde.
Mobileye har designet et system kaldet ansvarlig sikkerhed (RSS). RSS sikrer, at AV-systemer ikke udsteder kommandoer, der kan forårsage AV-ulykker.
Hvor sikker er det? Vores system kan bekræfte, at hver milliarder timers kørsel har tre ordrer af størrelse forbedring i en trafikulykke. Dødsraten fra menneskelig kørsel er en trafikallighed pr. million timer (dvs er antallet af trafikdøde i USA omkring 40 år sammenlignet med 40.000 i 2016).
Oplysninger om vores sikkerhedsmetoder
I praksis skal AV vide to ting:
Sikkerhedsstatus: Dette er en betingelse, hvor AV ikke forårsager ulykker, selvom andre køretøjer tager uforudsigelige eller hensynsfulde handlinger. Standard nødpolitik: Dette er et begreb, der definerer den mest aggressive evasive handling, som AV kan bruge til at opretholde eller vende tilbage til en sikker tilstand.
Skær i praksis
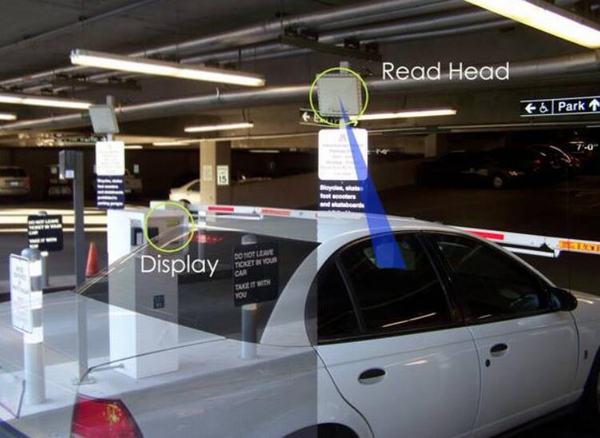
RSS har en god evne til at håndtere denne situation ved hjælp af de samme principper. Baseret på et sæt variabler kan sikkerhedskanalerne omkring AV beregnes. Hvis et menneskedrevet køretøj (billedet nedenfor) overtræder passagen før nedbrud, er det bilens ansvar. AV, med kontrast kan kontinuerligt beregne den sikre passage omkring andre køretøjer og vil aldrig udstede en kommando til at krænke rummet.

Billede 2: den beregnede sikre passage omkring bilen vil afgøre fejlen i tilfælde af skæret i manøvre
Deal med begrænset opfattelse og afsondrede objekter
Overvej dette: C0 forsøger at komme ud af parkeringspladsen i en gade, hvor en bygning blokke trafik. Den menneskelige drivers adfærd er at langsomt integrere i vejen og få mere og mere syn, indtil de perceptuelle begrænsninger fjernes. Men føreren gjorde nogle antagelser, såsom den mulige trafikhastighed, og når trafikken ville blive udsat. Antagelse af, at RSS beregner den maksimale rimelig hastighed kaldes Vlimit (dynamisk baseret på vejhastighedsgrænser). Med denne information, hvis C0 er AV, ved det, hvor meget det kan se på, og stadig giver C1 en chance for at bremse. Hvis C1 er hurtigere end Vlimit og collides, er det en C1 fejl. Omvendt, hvis C1 er AV, hvis der kan være en bil, der ikke kan se det og ønsker at forlade parkeringspladsen, vil det være mere forsigtig og køre videre i den centrale bane.

Billede 3, RSS indeholder situationer, hvor objekter (vehicles, fodgængere osv.) blokeres (skjult) af andre objekter.
Forlæng RSS直到阿莱vejstrukturer omfatter rute foretrukket, tovejs trafik,Traffic lys, ustrukturerede veje, ustruktureret vej.
Cellphone:
+86-13606915775(John Lee)
Phone:
+86-592-3365735(John)
+86-592-3365675(Cathy)
+86-592-3166853(Margaret)
+86-592-3365715(Anna)
+86-592-3365685(Ellen)
+86-592-3365681(Lynne)
Email:market@www.rudramyoga.com
Add: No.943, Tonglong Er Lu, Hongtang Town, Tong'an District, Xiamen( Xminnov IOT Industrial Park)